
AMR ROS-compatible and customized development for research and development.
We offer customization and technology development services for AMRs (Autonomous Mobile Robots) for research and development purposes. Utilizing ROS-compatible base models, we create unique specifications for university research and corporate R&D. Our engineers support specification development from the conceptual stage.

What you can do with PROTO-ROBO

By modifying existing products, development can be completed in a short timeframe.
We can modify standard Vstone Corporation products to suit your specific needs. This allows for faster turnaround times than developing a new product from scratch, and you can also take advantage of our extensive range of existing options.

It can also be used in combination with products from other companies.
We can integrate and connect third-party products to AMR robots to suit your specific application. This allows for rapid deployment by tailoring the combination to your environment.
Please let us know which equipment you would like to have installed when you contact us.

A wide variety of sensors and other options are available.
The series of mobile robots for research and development offers a wide range of options, including LRF (LiDAR), ROS PC, bumper sensors, and camera devices.
We can also propose sensor combinations and other configurations tailored to your specific needs.

New development of trolley robots is also possible.
We can also develop new aircraft from scratch for models not currently in our lineup. Please feel free to contact us, even from the requirements definition stage.
(Please note that we may not be able to provide support in some cases, such as for the development of your proprietary systems.)

Customization examples utilizing existing research and development trolley robots
Company A
Added extra batteries to extend operating time.
Company B
Hardware design for a load capacity of 300 kg.
Company C
Additional mounting holes have been machined into the top panel for installing separate equipment.
Company D
Design and installation of a scaffold for mounting additional equipment.
Company E
Instead of the optional LRF, the LRF specified by the user will be installed.
Company F
Change to a more powerful motor
Company G
We have newly developed and installed a lifting mechanism for objects weighing approximately 3 kg.
Company H
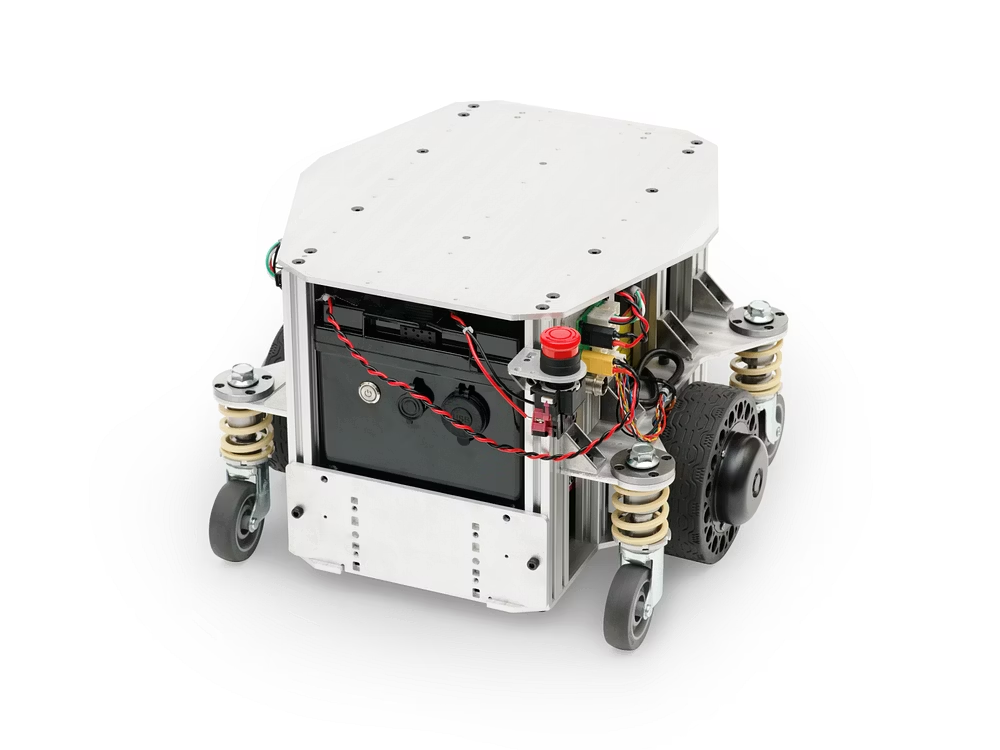
The design has been modified so that two of the four drive wheels can be replaced with casters.

Examples of Achievements and Case Studies

In-house development
Large 8-wheeled robot platform “8WDS Rover (tentative name)”
In this prototype, all eight wheels are drive wheels.
At the same time, all eight wheels are equipped with steering and suspension, ensuring reliable wheel contact while allowing for highly flexible movement.
Leveraging knowledge gained from existing products, we were able to develop, design, and manufacture the prototype, and achieve a wireless controllable state, in just over a month.
In-house development
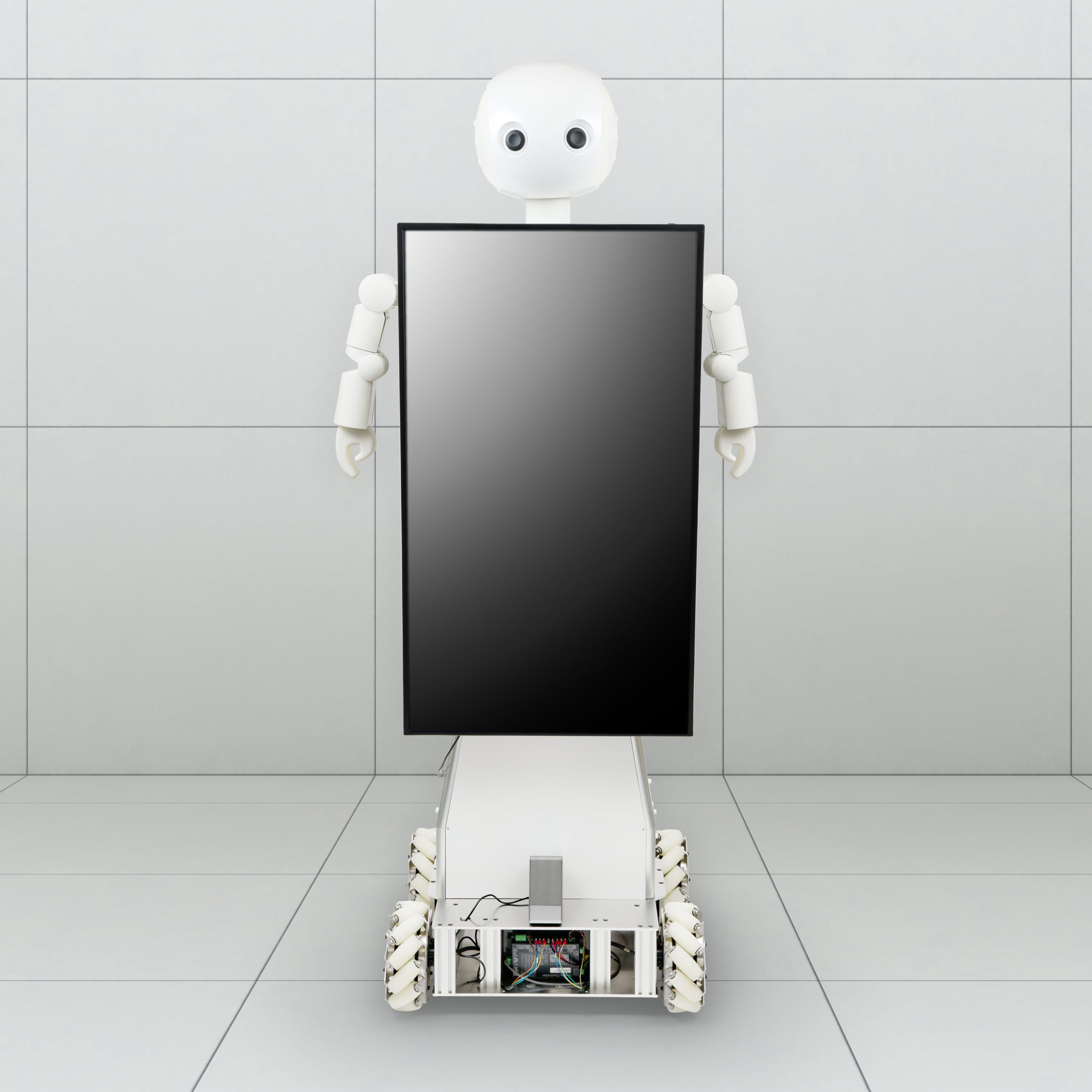
Large signage robot “Sandwich Robot”
The Sandwich Robot is a mobile communication robot equipped with digital signage (LCD displays) on both its front and back. It can display different images on the front and back, and can also perform effects synchronized with the robot’s movements, providing a memorable promotional experience that goes beyond simple signage.
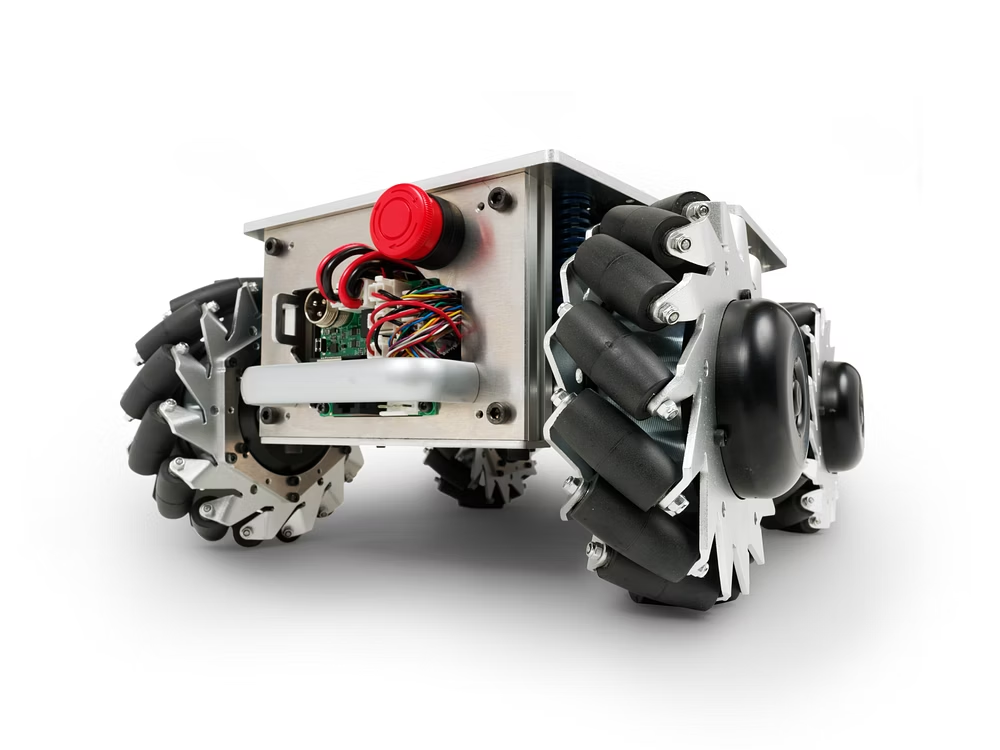
By utilizing parts from the “Mecanum Rover G120A” for the driving section and “Robovie-R4” for the head and arms of the upper body, we were able to create a prototype quickly and at a low cost compared to developing it from scratch by combining existing technologies.

Example of optional equipment
Processing using a depth camera and long-term operation are achieved.
Main unit: Mega Rover S40A-LB
Options:
LRF option TG30 (front, rear)
ROS PC option
VS-WRC054
depth camera

Example of optional equipment
AI-powered image processing is now available.
Main unit: Mega Rover Ver.3.0
Options:
RGB camera
display
PC with GPU

Tasaki Laboratory, Faculty of Science and Engineering, Meijo University
Research topic: Map generation for autonomous driving using inexpensive sensors
The Tasaki Laboratory is conducting research on map generation using inexpensive, vehicle-mountable sensors.
While autonomous vehicles cannot move smoothly without using maps, the cost of generating them is very high. As a simple test of map generation functionality using inexpensive sensors, the research results were incorporated into Autoware, an autonomous driving software, and a mega rover was controlled from Autoware.

Ark Co., Ltd.
RAXii, a baggage transport robot that combines novelty and user-friendliness.
Ark Co., Ltd., a company that provides custom product design development services centered on design and engineering technology, and offers small-lot resin products using simple mold/moldless manufacturing methods, has adopted Mecanum Rover for the drive mechanism of a robot that will be used in large commercial facilities, as an example of design development.
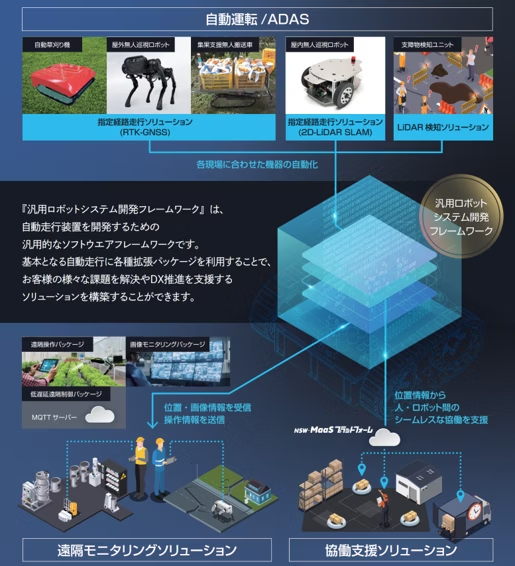
NSW Corporation “GEBOTS Framework”
By incorporating NSW Corporation’s proprietary solution, the general-purpose robot system development framework “GEBOTS Framework,” into MegaRover Ver2.1 and other systems, it becomes possible to achieve autonomous driving.
The “GEBOTS Framework,” a general-purpose robot system development framework, is a versatile software framework for developing autonomous driving devices.
By utilizing various extension packages for the basic autonomous driving system, it supports customers’ efforts towards “labor saving,” “unmanned operation,” and “IoT integration.”
Furthermore, integration with NSW’s unique web platform (NSW-MaaS Platform) enables dynamic management of each robot and extensions to remote control.
We provide the optimal framework for customers’ service utilization of autonomous driving devices.
*GEBOTS framework (General robot system development framework)

In-house development
Robovie-R4 Robot Platform for Development and Research
This is a life-sized robot for communication research.
The robot utilizes the “Mega Rover Ver. 3.0,” a well-established research and development robotic platform, for its mobile platform. Furthermore, by employing encoder-equipped DC motors for the movable axes of the upper body, it achieves the quiet operation and agile performance required of a communication robot.
Furthermore, in response to the increasingly complex demands of modern communication research, the design allows for the development and installation of various additional sensors and equipment.
The system can be built to supply power to its onboard equipment from a battery integrated into the main unit, enabling autonomous operation of the entire robot, including its internal components.
Vstone’s series of research and development trolleys are used in a wide range of applications.
The featured examples include cases where customers purchased standard products and then customized them themselves.

What is AMR?
An AMR (Autonomous Mobile Robot) is a robot that can move around while recognizing its surroundings without requiring human operation. Unlike
conventional AGVs (Automated Guided Vehicles) that travel along magnetic tapes or rails, AMRs use sensors and cameras to avoid obstacles and automatically determine the optimal route.
As a result, they can flexibly adapt to layout changes and are being increasingly used in various settings such as factories, warehouses, and research facilities.
Features of AMR
- No magnetic tape is required; it can move freely.
- Automatically detects and avoids obstacles.
- Flexible response to layout changes
- Safety design that allows for collaboration with people
AMR solves these problems.
- Reducing the burden of transportation work due to labor shortages
- Improved work efficiency and reduced manpower
- Reducing human error
- Productivity improvement through automation of simple tasks
Features of Vstone’s research and development trolley robots
| ROS compatible | Many models support ROS and ROS 2. They are designed to facilitate the creation and implementation of primary software for research and development purposes. |
| Variations in payload capacity (loading capacity) | We offer a range of models, from compact to large and heavy-duty, allowing you to choose the one that best suits your needs. |
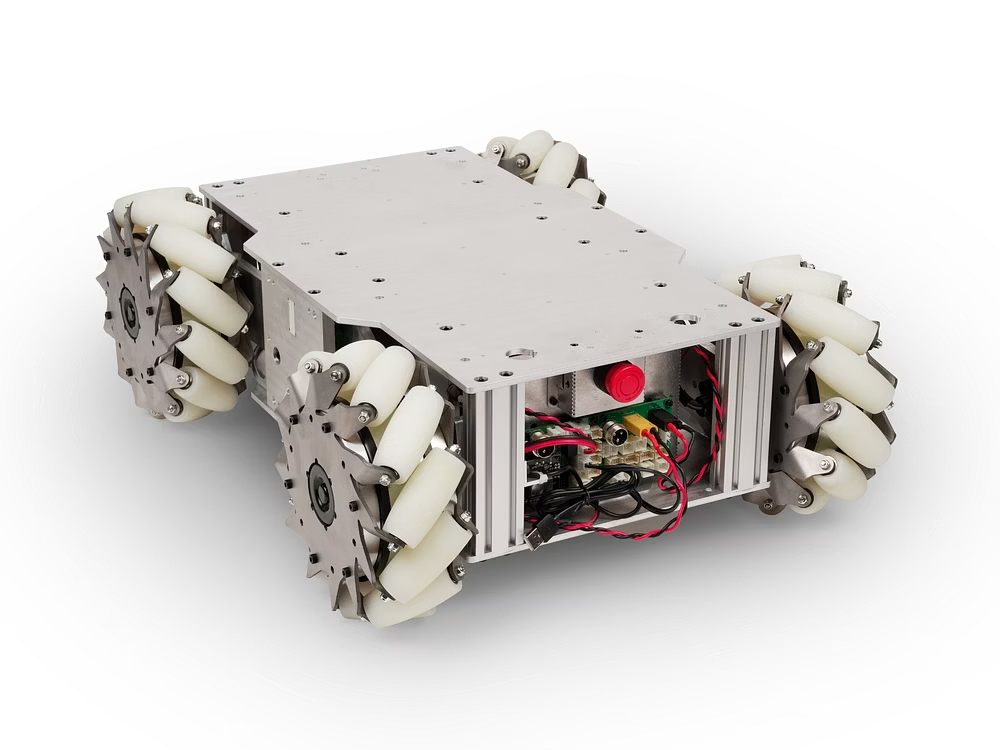
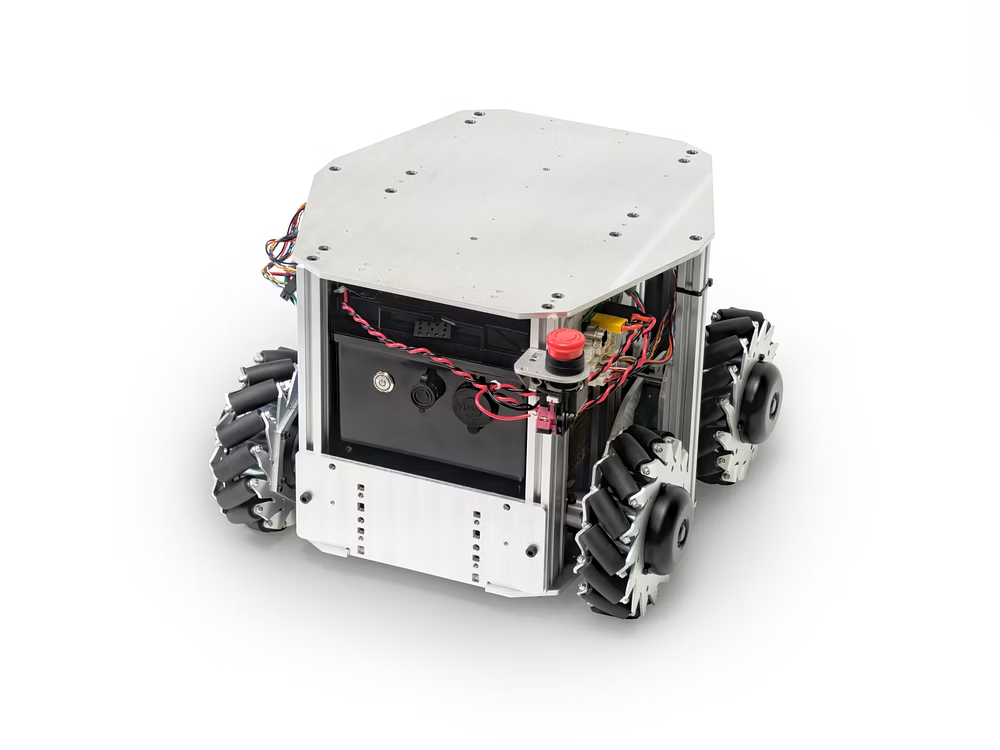
| Diversity of drive systems and transportation methods | The robot features configurations that enhance the freedom of movement for the platform robot, including two-wheel drive, four-wheel (equipped with Mecanum wheels), and four-wheel independent steering. |
| Customization available | We accept requests for additional hardware modifications and custom specifications, allowing for specification changes to suit your specific needs. |
| Noise reduction and driving efficiency improvements | The drive system and motor selection are designed with noise reduction in mind. |
| Option expandability | A variety of options can be installed, including a lift mechanism, bumper, LRF (LiDAR) option, and wireless charging. |
Consultation Process
For a smoother consultation, please follow the steps below for requirements definition, consideration, and discussion.

1.Organize the issues you want to solve.
Rather than simply stating “what kind of robot we want,” we would appreciate it if you could tell us specifically about the problem you want to solve. Engineers at Vstone Corporation will consider the problem and can present proposals, including development plans.

2.Clarification of budget and deadlines.
Just as important as clarifying the issues is defining “by when” and “with what budget” the implementation will take place. The proposed solutions often differ significantly depending on whether they are technically feasible or realistically feasible.

3. Confirmation of the assumed environment
It would be helpful if you could confirm the environmental conditions in which the robot will actually operate beforehand. In particular, indoor/outdoor conditions, as well as conditions such as raindrops and dust, can greatly affect the feasibility and cost of running the robot.

4.Please submit your inquiry via the web form.
After reviewing and confirming the above information, please contact our representative via the web form. We will then conduct an online meeting or similar to gather more specific details.
For customers who submit an inquiry through the form, our engineers will contact you in order to discuss your needs and work together to find the best solution.
Frequently Asked Questions (FAQ)
We receive various inquiries regarding AMRs (Autonomous Mobile Robots) for research and development from university research institutions and corporate R&D departments. We also handle technical studies from the conceptual stage, including specification changes that are difficult to accommodate with off-the-shelf products, expansion in ROS environments, and the installation of special sensors.
Q1: What kind of robot is an AMR for research and development?
A: This is an autonomous mobile robot optimized for research use in universities and companies. Based on a ROS/ROS 2 compatible base model, we customize the specifications and configuration to suit the specific experiment.
Q2: What are the differences between this and commercially available AMRs/AGVs?
A: Commercially available machines are designed for standardized transport, but for research purposes, control modifications and sensor expansions are important. Protorobo can provide configurations that can accommodate unique specifications and algorithm verification.
Q3: Is it compatible with ROS/ROS 2?
A: Our R&D robotic trolley series supports topic communication via rosserial or micro-ROS. We propose designs that take into account integration with existing research environments and future expansion.
Q4: Can I consult with you even if the specifications haven’t been finalized yet?
A: Yes, it’s possible. We’ll help you organize the technical aspects from the conceptual stage and propose the optimal specifications. We also support starting with a Proof of Concept (PoC) or prototype.
Q5: Can you build a prototype machine for research purposes starting from just one unit?
A: Yes, we can handle orders starting from just one unit. We are flexible and can accommodate small-scale research projects and demonstration experiments.
Q6: What kinds of research themes has it been used in?
A: We provide comprehensive support for mobile robot-related research, including autonomous mobile control, SLAM, self-localization, transport verification, and sensor addition.
Q7: Please explain the process from initial consultation to delivery.
A: We proceed in the following order: initial consultation → technical review and design → development and prototyping → delivery. We have extensive experience in development for research institutions, so we can provide smooth support.
Q8: What are the estimated delivery times and costs?
A: It varies depending on the scale and content of the project, but please feel free to contact us first. After hearing the details, we will propose an appropriate deadline and cost.
Q9: What kind of support system is in place after delivery?
A: We provide software updates, parts replacement, and repair services even after delivery. We have a support system in place to ensure that you can use our products with peace of mind in research and development settings.
Q10: Is it possible to sign an NDA?
A: Of course. We will sign an NDA beforehand to ensure the confidentiality of the research content.
If you have a research topic or specifications you’re considering, please feel free to contact us.
A technical engineer will assist you directly.
Examples of research applications and published papers for AMRs (Autonomous Mobile Robots).
Our AMRs (Autonomous Mobile Robots) are widely adopted by universities and research institutions for research purposes. They are used in a wide range of applications, including SLAM research and demonstration experiments of navigation algorithms.
We can also customize the system and build experimental environments to suit your research theme. Please feel free to contact us for more information.
・Research on indicators for predicting human avoidance behavior
→Used in research to estimate movement direction and collision avoidance direction from the rotation angle of a person’s waist (Robot used: Mega Rover F120 series)
Yamauchi, T., Tamura, H., Minami, T., & Nakauchi, S. (2025). Waist rotation angle as indicator of probable human collision-avoidance direction for autonomous mobile robots. PLoS One, 20(5), e0323632.
・Research on human behavior and comfort during transport
→Analyzing human behavior and psychological burden during transport by autonomous mobile robots, and utilizing the findings for evaluating cooperative operation and comfort between humans and robots (Robot used: Mega Rover F120 series)
Tamura, H., Konno, T., Ito, K., Matsubara, Y., Martinsen, M. M., Nakauchi, S., & Minami, T. (2025). Human behavior and comfort during load carrying to autonomous mobile robot. International Journal of Social Robotics, 1-19.
・Research on trajectory tracking with speed control during turns
→Used to verify a control method that automatically adjusts speed while turning. Utilized in the development of control algorithms to achieve stable trajectory tracking.
Hiroki Tanaka, and Satoko Yamakawa. Trajectory tracking control of a mobile robot with automatic speed adjustment during turns.
Annual Meeting 2018. The Japan Society of Mechanical Engineers, 2018.
・Research on autonomous driving control using deep reinforcement learning
→Utilized as a verification environment for autonomous driving algorithms for transport robots using reinforcement learning. Used for learning and evaluating optimal driving control through trial and error. (Vehicle used: Mega Rover / LiDAR equipped, ROS compatible configuration)
Tamio Tasaki. Research on autonomous driving control of transport robots using deep reinforcement learning. Amano Industrial Technology Research Institute. nd, https://zai-amano.or.jp/report02/report02-2023/ , (Accessed 2025-10-16).
・Autonomous driving experiment in conjunction with AR goggles
→Used to verify an autonomous driving system in conjunction with visual assistance using AR goggles. Utilized in research on extending human-robot interaction.
Yugo Matsui, Shota Yoshida, Tomohiro Nakagawa, & Atsuhiko Shintani. (2025). Autonomous driving experiment of a stand-up vehicle using AR goggles. Transactions of the Japan Society of Mechanical Engineers, 25-00011.
・Research on guide dog robots that transmit visual information via voice
→Used to verify robot systems that present the visual environment as audio information. Used in research on navigation technology aimed at assisting visually impaired people.
Reiya Ichikawa, Bin Zhang, & Xianyu Lin. (2023). Research on guide dog robots capable of expressing the visual environment via voice.
Transactions of the Institute of Electrical Engineers of Japan, C (Electronics, Information and Systems Division) ,
143 (5), 562-568.
Product Lineup





Product Specifications Comparison Chart
The specifications listed below are specific to each of the off-the-shelf trolley robots offered for research and development purposes .
The values and configurations listed on this page represent the minimum guaranteed specifications for each product , and unless customization is requested, the product will be provided based on these specifications.
Based on these specifications, it is possible to perform customized development, such as changing the installed equipment or control method, or modifying the mechanism . In such cases, the specifications will be adjusted according to the customized content.
| Mega Rover Ver.3.0 | Mecanum Rover Ver.3.0 | 4WDS Rover X40A | Mega Rover F120A | Mecanum Rover G120A | 4WDS Rover X120A | Mega Rover S40A-LB | Mecanum Rover G40A-LB | 4WDS Rover X120A-LB | |
|---|---|---|---|---|---|---|---|---|---|
| length | 359.5mm | 392mm | 430mm | 468mm | 603mm | 476mm | 362mm | 402.45mm | 530mm |
| width | 357mm | 323mm | 430mm | 482mm | 446mm | 519mm | 437mm | 403mm | 530mm |
| height | 150mm | 165mm | 194mm | 191mm | 203mm | 235mm | 270mm | 270mm | 265mm |
| weight | Approximately 14.2kg | Approximately 17.9kg | Approximately 28.4kg | Approximately 33kg | Approximately 48.8kg | Approximately 43.6kg | Approximately 23.5kg | Approximately 25.4kg | Approximately 43.6kg |
| Load capacity | Approximately 40kg | Approximately 120kg | Approximately 40kg | Approximately 120kg | |||||
| Maximum speed (actual measured value) | 1.6m/s | ||||||||
| battery | 24V sealed lead-acid battery 288Wh | 24V sealed lead-acid battery 624Wh | 24V sealed lead-acid battery 480Wh | 24V 60Ah (1440Wh) Li-Fe Battery | |||||
| Operating hours (approximate) | Approximately 42 hours | Approximately 28 hours | Approximately 24 hours | Approximately 46 hours | - | - | Approximately 155 hours | Approximately 113 hours | - |
| Drive system | Two-wheel drive, rear caster x 1 | Equipped with four-wheel drive and Mecanum wheel suspension. | Four-wheel drive, four-wheel independent steering, suspension | Two-wheel drive, rear caster x 1 | Equipped with four-wheel drive and Mecanum wheel suspension. | Four-wheel drive with independent steering | Two-wheel drive with caster wheels and four suspension systems. | Equipped with four-wheel drive and Mecanum wheel suspension. | Four-wheel drive with independent steering |
| tire diameter | 140mm | 152mm | 140mm | 170mm | 203mm | 170mm | 140mm | 152mm | 170mm |
| motor | BLDC motor 40W×2 | BLDC motor 40W×4 | BLDC motor 40W×8 | BLDC motor 105W×2 | BLDC motor 105W×4 | BLDC motor 40W×4、105W×4 | BLDC motor 40W×2 | BLDC motor 40W×4 | BLDC motor 45W×4、105W×4 |
| Rotation detection | Magnetic encoder | ||||||||
| Control board | VS-WRC058 | VS-WRC071 | |||||||
| Direction of movement |  |  |  | | | | | | |
※These specifications are the standard specifications for each off-the-shelf robot model.
※Specifications for customized models will be defined individually according to the changes made.
Do you have any of these problems?
・Commercially available AMRs and AGVs are not suitable for research purposes.
・I want to be able to freely configure sensors and control systems.
・I want a base machine that I can experiment with in a ROS/ROS 2 environment.
・I want to start with just one unit for prototyping and testing.
・The specifications are not yet finalized and need to be clarified technically.
In research and development applications, off-the-shelf products often don’t meet the needs. We can also provide consultation from the conceptual stage.
Useful Information
Here are some related articles to help you better understand AMR robots for research and development.






Take your R&D to the next level now.
To maximize your research results, our expert engineers will provide ongoing support from the technical review and conceptualization stages.
Please feel free to contact us for a free development consultation.