
研究開発向けAMR
ROS対応・カスタマイズ開発
研究開発向けAMR(自律移動ロボット)のカスタマイズや技術開発に対応しています。ROS対応のベース機体を活用し、大学研究や企業R&D向けに独自仕様を実現。構想段階からエンジニアが仕様検討を支援します。

プロトロボでできること

既存製品の改造により、短納期での開発が可能
ヴイストン株式会社製の通常製品に対し、お客様のご用途に合わせた改造が可能です。ゼロから新規開発するよりも短納期で対応可能で、既存の豊富なオプションをご活用いただくこともできます。

他社製品との組み合わせも可能
AMRロボットに対して、お客様のご用途に合わせた他社製品を組み付け・接続することが可能です。ご用途の環境に合わせた組み合わせにより、迅速に稼動を開始することができます。
搭載ご希望の機材については、弊社へのお問い合わせ時にご連絡ください。

多彩なセンサー類などのオプションが活用可能
研究開発用台車ロボットのシリーズには、LRF(LiDAR)やROS PC、バンパーセンサーやカメラデバイスなど、豊富なオプションが用意されています。
お客様でのご用途に合わせて、センサーの組み合わせ内容などをご提案することも可能です。

台車ロボットの新規開発も可能
既存ラインナップにない機体について、ゼロから新規開発することも可能です。要件定義の段階からもお問い合わせ可能ですので、お気軽にご相談ください。
(お客様の独自システムに関する開発など、サポートできないケースもございます。ご了承ください)

既存の研究開発用台車ロボットを活用したカスタマイズ事例
A社
稼働時間を長くするためにバッテリーを増設
B社
積載重量300㎏用にハードウェアの設計
C社
別途機器を搭載するための取り付け穴を天板に追加工
D社
別途機器を搭載するのためのやぐらの設計、取り付け
E社
オプション品のLRFではなくユーザーが指定するLRFを取り付け
F社
より強力なモーターへの変更
G社
3kg程度の物体の昇降機構を新たに開発、取付け
H社
四輪ある駆動輪のうち、二輪をキャスターへ交換可能な設計に変更

実績・事例紹介

自社開発
大型の8輪台車ロボット「8WDSローバー(仮称)」
本試作品では、8輪すべてが駆動輪となっています。
同時に、8輪すべてにステアリングとサスペンションを搭載しており、車輪の確実な接地を実現しつつ、自由度の高い移動が可能です。
既存の製品から得た知見を活かしつつ、1ヵ月強で開発・設計・製造の上、無線操縦可能な状態までを達成しました。
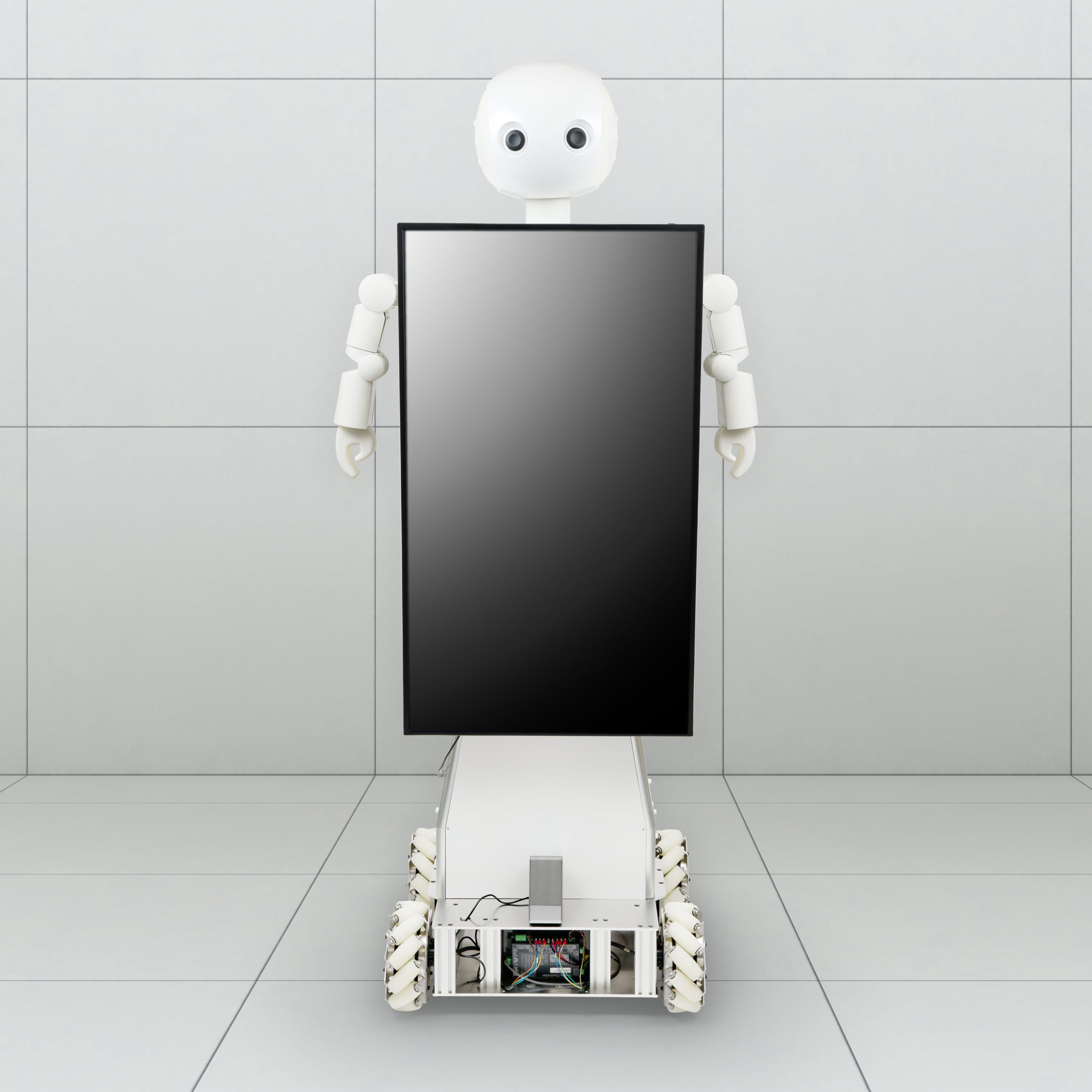
自社開発
大型のサイネージロボット 「サンドイッチロボ」
サンドイッチロボは、前面・背面の双方にデジタルサイネージ(液晶ディスプレイ)を搭載した、走行型のコミュニケーションロボットです。前後それぞれに異なる映像を表示できるほか、ロボットの動作と連動させた演出も可能で、単なるサイネージ表示にとどまらない、強い印象を残すプロモーション体験を提供します。
走行部には「メカナムローバーG120A」、上半身の頭部・腕部には「Robovie-R4」の部品を活用し、既存技術を組み合わせることで、ゼロから開発する場合に比べてスピーディかつ低コストでの試作を実現しました。

オプション搭載例
デプスカメラによる処理と長時間稼動を実現
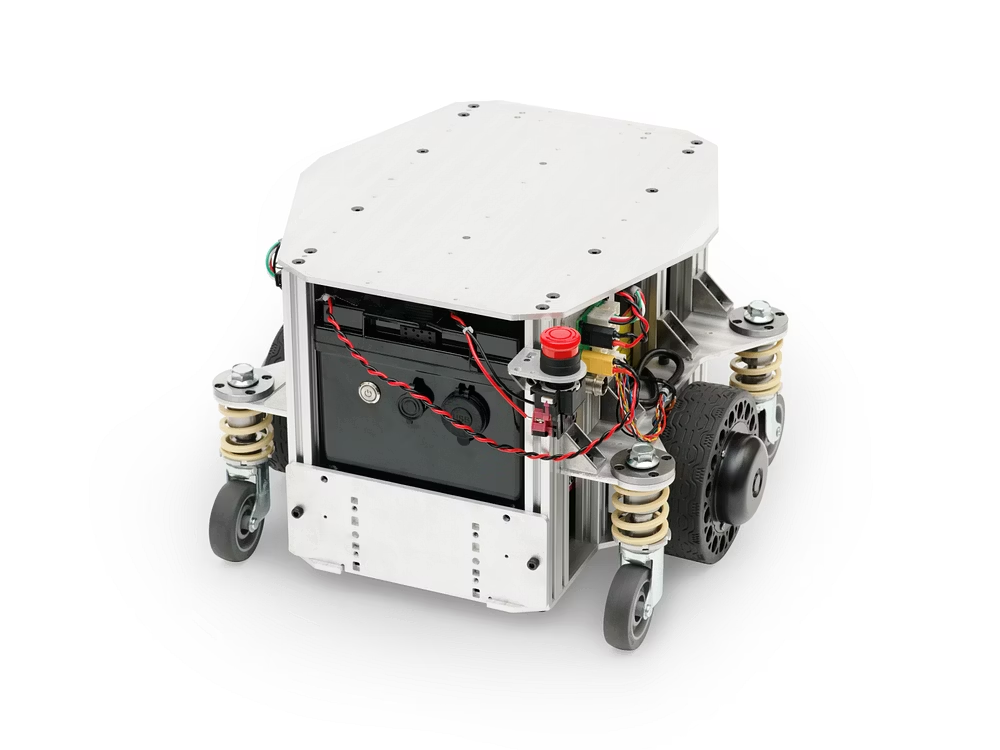
本体:メガローバーS40A-LB
オプション:
LRFオプションTG30(前、後)
ROS PC オプション
VS-WRC054
デプスカメラ


名城大学理工学部 田崎研究室
研究テーマ:安価なセンサーによる自動運転向け地図生成
田崎研究室では、車載可能な安価なセンサーで地図生成を行う研究を行っています。
自動運転車は地図を利用しないとスムーズな動きはできませんが、地図の生成コストはとても高いという問題があります。 安価なセンサーでの地図生成機能の簡易テストとして、研究成果を自動運転用ソフトウェアAutowareに組込み、 Autowareからメガローバーを制御しました。

株式会社アーク様
新しさと親しみやすさをもった、手荷物輸送ロボット RAXii(ラクシー)
デザイン・設計技術を主軸とした製品意匠のカスタム開発サービス、簡易金型/型レス工法による小ロット樹脂製品の提供を事業とする株式会社アーク様より、大型商業施設で活躍するロボットのデザイン展開事例として、その駆動部分にメカナムローバーをご採用いただきました。
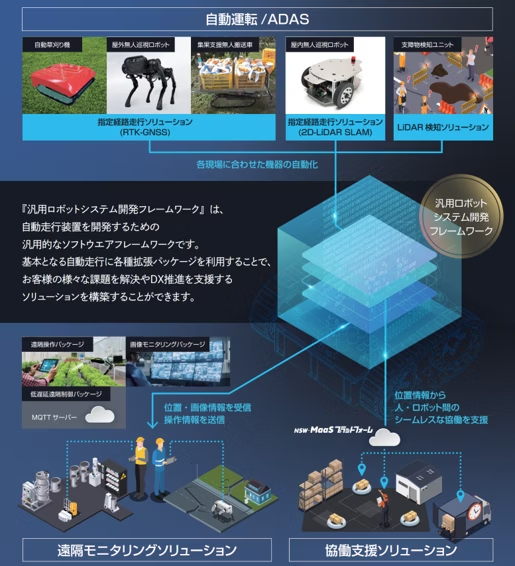
NSW株式会社 「GEBOTSフレームワーク」
NSW株式会社の独自ソリューションである、汎用ロボットシステム開発フレームワーク「GEBOTSフレームワーク」を、メガローバーVer2.1などに組込むことで自動走行化を実現することが可能となります。
汎用ロボットシステム開発フレームワーク 「GEBOTSフレームワーク」は、自動走行装置を開発するための汎用的なソフトウエアフレームワークです。
基本となる自動走行に各種拡張パッケージを利用することで、お客様の「省力・省人化」「無人化」「IoT化」を支援します。
またNSW独自のWEBプラットフォーム(NSW-MaaS プラットフォーム)との連携により各ロボットの動態管理、遠隔操作の拡張等も可能です。
お客様の自動走行装置のサービス活用に向けた最適なフレームワークをご提供いたします。
※GEBOTSフレームワーク(GEneral roBOT System Development Framework)

自社開発
開発研究用ロボットプラットフォーム Robovie-R4
コミュニケーション研究のための等身大ロボットです。
移動のための台車部分に研究開発用台車ロボットとして定評のある「メガローバーVer.3.0」を採用したほか、上半身の可動軸にはエンコーダー付きDCモーターを用いることにより、コミュニケーションロボットに求められる静粛性と機敏な動作性能を実現しました。
また、複雑化する昨今のコミュニケーション研究の需要に合わせ、様々なセンサーや機材を追加で開発・搭載できるように配慮した設計となっています。
本体に内蔵したバッテリーから搭載機器に給電する形で構築することができ、内部機器も含めたロボット全体での自律動作を実現できます。
ヴイストン製研究開発用台車シリーズは多くのご用途で活用いただいております。
掲載事例には、標準品をご購入いただいた後、お客様にてカスタマイズを実施された事例も含まれます。
ヴイストン製研究開発用台車ロボットの特徴
| ROS対応 | 多くのモデルでROS・ROS 2に対応しています。研究・開発の用途において主となるソフトウェアの製作・実装が容易になるよう設計しています。 |
| 可搬重量(積載能力)のバリエーション | 小型モデルから、大型・重荷重対応モデルまで揃えており、用途に応じた選択が可能です。 |
| 駆動方式・移動方式の多様性 | 二輪駆動、四輪(メカナムホイール搭載)型、四輪独立ステアリング型など、台車ロボットとしての動きの自由度を高めた構成になっています。 |
| カスタマイズ対応 | ハードウェア面での追加加工やカスタム仕様での対応を受け付けており、用途に応じた仕様変更が可能です。 |
| 静音化・駆動効率の工夫 | 駆動方式やモーターの選定で騒音低減に配慮した仕様 |
| オプション拡張性 | リフト機構、バンパー、LRF(LiDAR)オプション、無線充電など、多様なオプションを取り付け可能です。 |
ご相談の流れ
ご相談の際には、以下の流れで要件定義・ご検討とご相談をいただけますとスムーズです。

1.解決したい課題の整理
「どのようなロボットが欲しい」よりも、解決したい課題を具体的にご相談いただく形がありがたいです。ヴイストン株式会社のエンジニアにて課題を検討し、開発案を含むご提案の提示が可能です。

2.予算感・納期感などの明確化
課題の整理と同様に、「いつまでに」「予算は幾らで」実施するかを明確化することも重要です。技術的に可能かどうか、という観点と、現実的に可能かどうか、という観点では、ご提案内容が大きく異なるものとなることも少なくありません。

3.想定環境の確認
実際にロボットを動作させる環境の条件も、事前にご確認いただけるとスムーズです。特に、屋内・屋外の条件や、雨滴や砂塵などの条件によって、ロボットの実現可否やコスト感が大きく変動します。

4.ご相談はWebフォームからご入力ください
上記までの内容をご検討・ご確認いただいた後に、Webフォームから弊社担当にご相談ください。オンラインミーティング等にて、より具体的な内容をヒアリングさせていただきます。
フォームからご相談いただいたお客様に、順次弊社エンジニアがお話をお伺いし、最適な解決策を一緒にご検討いたします。
よくあるご質問(FAQ)
研究開発向けAMR(自律移動ロボット)に関して、大学研究や企業R&D部門からさまざまなご相談をいただいています。既製品では対応が難しい仕様変更や、ROS環境での拡張、特殊センサー搭載など、構想段階からの技術検討にも対応しています。
Q1: 研究開発向けAMRとはどのようなロボットですか?
A: 大学や企業の研究用途に最適化した自律移動ロボットです。ROS/ROS 2対応のベース機体をもとに、実験内容に合わせた仕様構成やカスタマイズを行います。
Q2: 市販のAMR・AGVとの違いは何ですか?
A: 市販機は定型搬送向けですが、研究用途では制御変更やセンサー拡張が重要です。プロトロボでは、独自仕様やアルゴリズム検証に対応できる構成が可能です。
Q3: ROS/ROS 2には対応していますか?
A: 弊社の研究開発用台車ロボットシリーズをベースとした構成では、rosserialまたはmicro-ROSによるトピック通信に対応しています。既存の研究環境との連携や将来的な拡張も見据えた設計をご提案します。
Q4: 仕様が固まっていなくても相談できますか?
A: 可能です。構想段階から技術的に整理し、最適な仕様をご提案します。PoCや試作からのスタートも対応しています。
Q5: 研究用途の試作機を1台から構築できますか?
A: はい、1台から対応可能です。小規模な研究プロジェクトや実証実験にも柔軟に対応します。
Q6: どのような研究テーマでの活用実績がありますか?
A: 自律移動制御、SLAM、自己位置推定、搬送検証、センサー追加など、移動ロボット関連の研究に幅広く対応します。
Q7: ご相談から納品までの流れを教えてください
A: ヒアリング → 技術検討・設計 → 開発・試作 → 納品の流れで進めます。研究機関向けの開発経験が豊富なため、スムーズにご支援いたします。
Q8: 納期や概算費用の目安は?
A: プロジェクトの規模や内容により異なりますが、まずはお気軽にご相談ください。詳細をお聞きした上で、適切な納期と費用をご提案いたします。
Q9: 納品後のサポート体制は?
A: 納品後もソフトウェア更新、部品交換、修理対応などを承ります。研究開発現場で安心してご利用いただけるようサポート体制を整えております。
Q10: NDA締結は可能ですか?
A: もちろん可能です。研究内容の機密保持については、事前にNDAを締結させていただきます。
研究テーマやご検討中の仕様がございましたら、まずはお気軽にご相談ください。
技術担当エンジニアが直接ご対応いたします。
研究用途AMR(自律移動ロボット)の活用事例・論文掲載例
本シリーズは、大学・研究機関を中心に、研究用途AMR(自律移動ロボット)として多数導入されています。
実証実験・論文研究・アルゴリズム検証など、幅広い用途でご活用いただいています。
・田中皓貴, and 山川聡子. 旋回時に自動で速度調整を行う移動ロボットの軌道追従制御. 年次大会 2018. 一般社団法人 日本機械学会, 2018.
・田崎民生. 深層強化学習を用いた搬送ロボットの自律走行制御に関する研究. 公益財団法人 天野工業技術研究所. n.d., https://zai-amano.or.jp/report02/report02-2023/, (参照 2025-10-16).
・松井雄吾, 吉田翔太, 中川智皓, & 新谷篤彦. (2025). AR ゴーグルを用いた立ち乗り式車両の自動走行実験. 日本機械学会論文集, 25-00011.
・市川玲也, 張斌, & 林憲玉. (2023). 視覚環境を音声で表現可能な盲導犬ロボットに関する研究. 電気学会論文誌 C (電子・情報・システム部門誌), 143(5), 562-568.
製品ラインナップ





製品仕様比較表
以下に示す仕様は、研究開発用途向けとして提供している各台車ロボット既製品それぞれに固有の仕様です。
本ページに記載している数値・構成は、各製品において最低限保証される仕様であり、カスタマイズを行わない場合には、この仕様に基づいて提供されます。
本仕様をベースとして、搭載機器や制御方式の変更、機構改造などのカスタマイズ開発を行うことが可能であり、その場合はカスタマイズ内容に応じた仕様となります。
| メガローバーVer.3.0 | メカナムローバーVer.3.0 | 4WDSローバーX40A | メガローバーF120A | メカナムローバーG120A | 4WDSローバーX120A | メガローバーS40A-LB | メカナムローバーG40A-LB | |
|---|---|---|---|---|---|---|---|---|
| 全長 | 359.5mm | 392mm | 430mm | 468mm | 603mm | 476mm | 362mm | 402.45mm |
| 全幅 | 357mm | 323mm | 430mm | 482mm | 446mm | 519mm | 437mm | 403mm |
| 全高 | 150mm | 165mm | 194mm | 191mm | 203mm | 235mm | 270mm | 270mm |
| 本体重量 | 約14.2kg | 約17.9kg | 約28.4kg | 約33kg | 約48.8kg | 約43.6kg | 約23.5kg | 約25.4kg |
| 積載重量 | 約40kg | 約120kg | 約40kg | |||||
| 最高速度 (実測値) | 1.6m/s | |||||||
| バッテリー | 24Vシール鉛バッテリー 288Wh | 24Vシール鉛バッテリー 624Wh | 24Vシール鉛バッテリー 480Wh | 24V 60Ah (1440Wh) Li-Feバッテリー | ||||
| 稼働時間 (目安) | 約42時間 | 約28時間 | 約24時間 | 約46時間 | - | - | 約155時間 | 約113時間 |
| 駆動方式 | 二輪駆動 後部キャスター×1 | 四輪駆動メカナムホイール サスペンション搭載 | 四輪駆動 四輪独立ステアリング サスペンション | 二輪駆動 後部キャスター×1 | 四輪駆動メカナムホイール サスペンション搭載 | 四輪駆動 四輪独立ステアリング | 二輪駆動 キャスター×4 サスペンション搭載 | 四輪駆動メカナムホイール サスペンション搭載 |
| タイヤ直径 | 140mm | 152mm | 140mm | 170mm | 203mm | 170mm | 140mm | 152mm |
| モーター | BLDCモーター 40W×2 | BLDCモーター 40W×4 | BLDCモーター 40W×8 | BLDCモーター 105W×2 | BLDCモーター 105W×4 | BLDCモーター 40W×4、105W×4 | BLDCモーター 40W×2 | BLDCモーター 40W×4 |
| 回転検出 | 磁気式エンコーダー | |||||||
| 制御基板 | VS-WRC058 | |||||||
| 移動方向 |  |  |  | | | | | |
※本仕様は、各台車ロボット既製品の標準仕様です。
※カスタマイズを行った場合の仕様は、変更内容に応じて個別に定義されます。
こんなお悩みはありませんか?
・市販のAMR・AGVでは研究用途に合わない
・センサーや制御系を自由に構成したい
・ROS/ROS 2環境で実験できるベース機体がほしい
・1台から試作・検証を行いたい
・仕様が固まっておらず、技術的に整理したい
研究開発用途では既製品では対応が難しいケースが多くあります。構想段階からのご相談も可能です。
今すぐ、貴社の研究開発を次のステージへ
お客様の研究成果を最大化するため、技術検討・構想整理の段階から専門エンジニアが伴走支援いたします。
まずは無料の開発相談から、お気軽にお問い合わせください。